Sensor fusion with Scilab
During this training, you will be able to discover usefull techniques for sensor fusion, using SCILAB numerical computing software.
Training duration
One dayDate and place of training
Location: Toulouse (France), dates: contact us
.Content
| I - INTRODUCTION | |
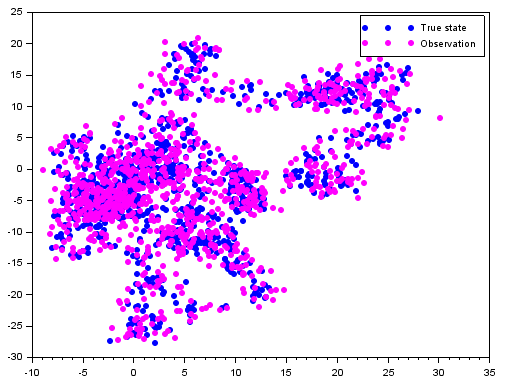
| We will begin by trying to have a global view on the needs and on the available data sources (sensors), then we will see how to model the dynamic estimation problems in a general way (Bayesian estimation). | |
|  |
| II - KALMAN FILTER | |
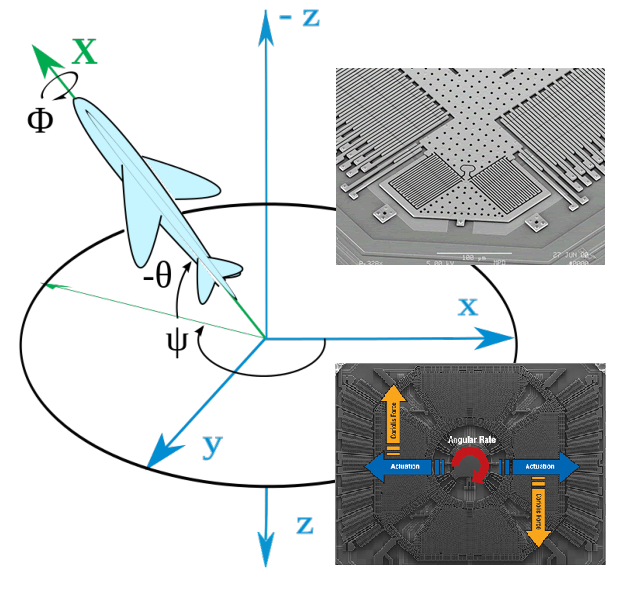
| In this part, will interest ourself to the Kalman filter and at some of its extensions, especially for non linear models (EKF filter). We will put these techniques in practice so as to realize sensor fusion on an IMU. | |
|  |