Fusion de capteurs avec SCILAB
Durant cette formation, vous aurez l'occasion de découvrir (ou re-découvrir) les techniques les plus utiles pour la fusion de capteurs, via une approche concrčte basée sur SCILAB et de nombreux cas et travaux pratiques. Le stagiaire pourra s'approprier chacune de ces techniques de maničre intuitive et ludique, grâce ŕ des travaux pratiques issus de cas réels.
Durée de la formation
Un jourDate et lieu de la formation
Lieu : Toulouse, date : sur demande.
Inscription
Formulaire d'inscription disponible ici.
Contenu
| I - INTRODUCTION | |
| Nous allons commencer par faire un petit tour d'horizon des besoins et des sources de données (capteurs) disponible, puis nous verrons comment modéliser le problčme de maničre générale. | |
|  |
| II - FILTRE DE KALMAN | |
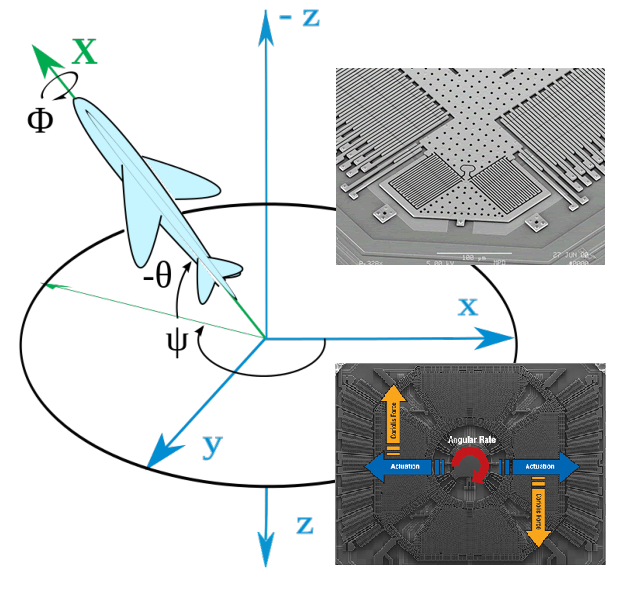
| Dans cette partie, nous allons nous intéresser au filtre de Kalman et ŕ quelques unes de ses extensions, en particulier pour les modčles non linéaires (filtre EKF). Nous mettrons ces techniques en pratique pour réaliser la fusion de capteurs sur une unité de mesure inertielle. | |
|  |
Travaux pratiques
Tout au long de l'atelier l'ensemble des points abordés sera illustré par des exemples et de petits exercices qui vous permettront de mettre en oeuvre directement les notions vues dans SCILAB.